The look and feel of the final prototype is approachable and organic.
The materials used included plywood, white fabric, and aluminum accents. We laser-cut a living hinge out of thin plywood to act as a cover for the Steward Platform, allowing us to hide the mechanism and electronics behind it
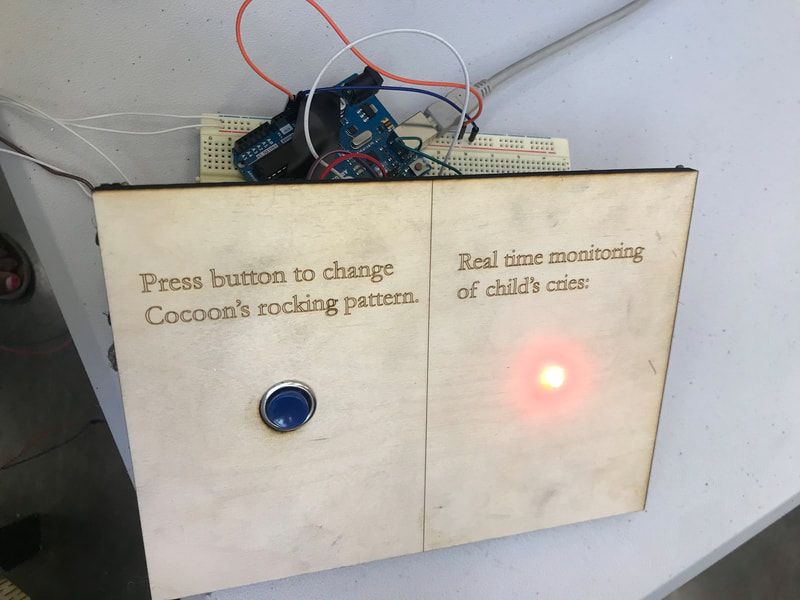
We focused on creating an interactive experience. A sound sensor in the bassinet monitors baby noises, with loud and soft cries translating into a visual LED color change. We included a simple push button to allow users to manually change the rocking patterns. In the future, we would like to implement a control system to link differences in intensity of baby cries to changes in the pattern of rocking, allowing parents to customize the product to their baby's needs.

|


|
The 3 degrees of freedom provide a smooth and safe rocking motion.
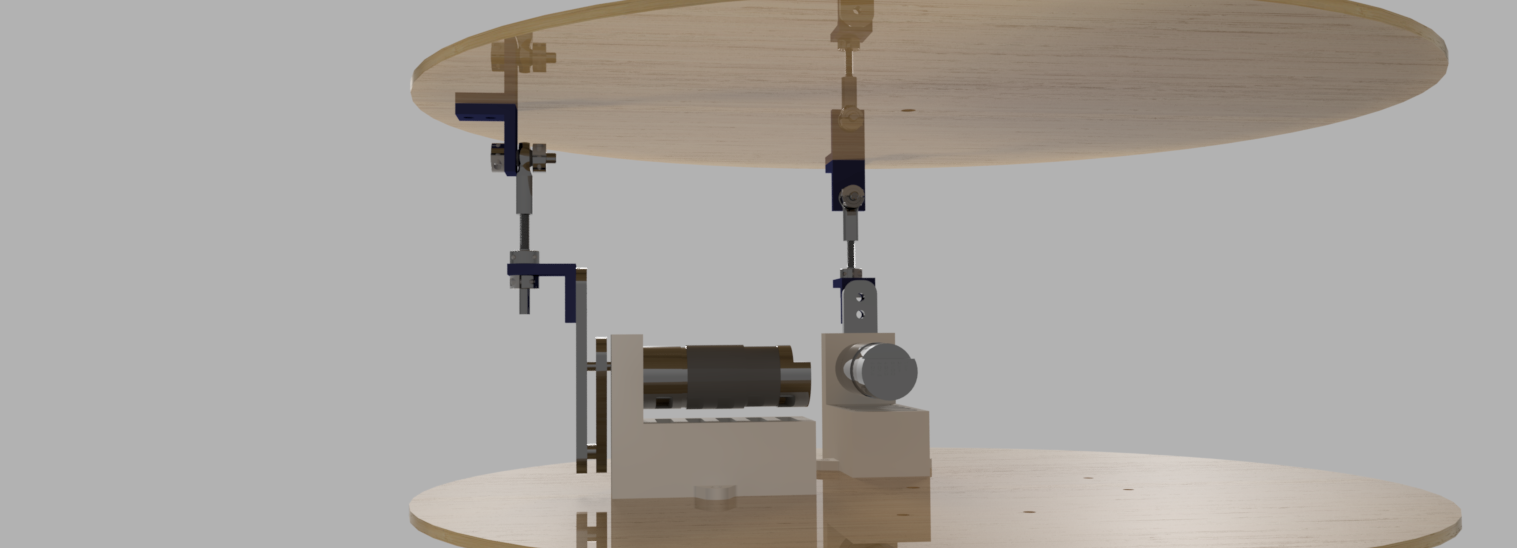
v1: With this iteration we moved from linear actuators to a 2-bar linkage assembly, using DC motors. We worked on transforming rotational motion into linear motion.
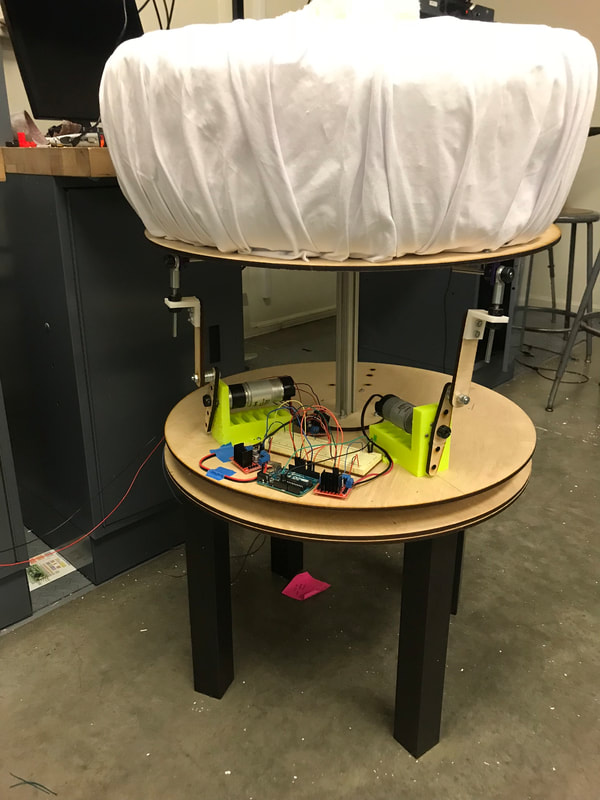
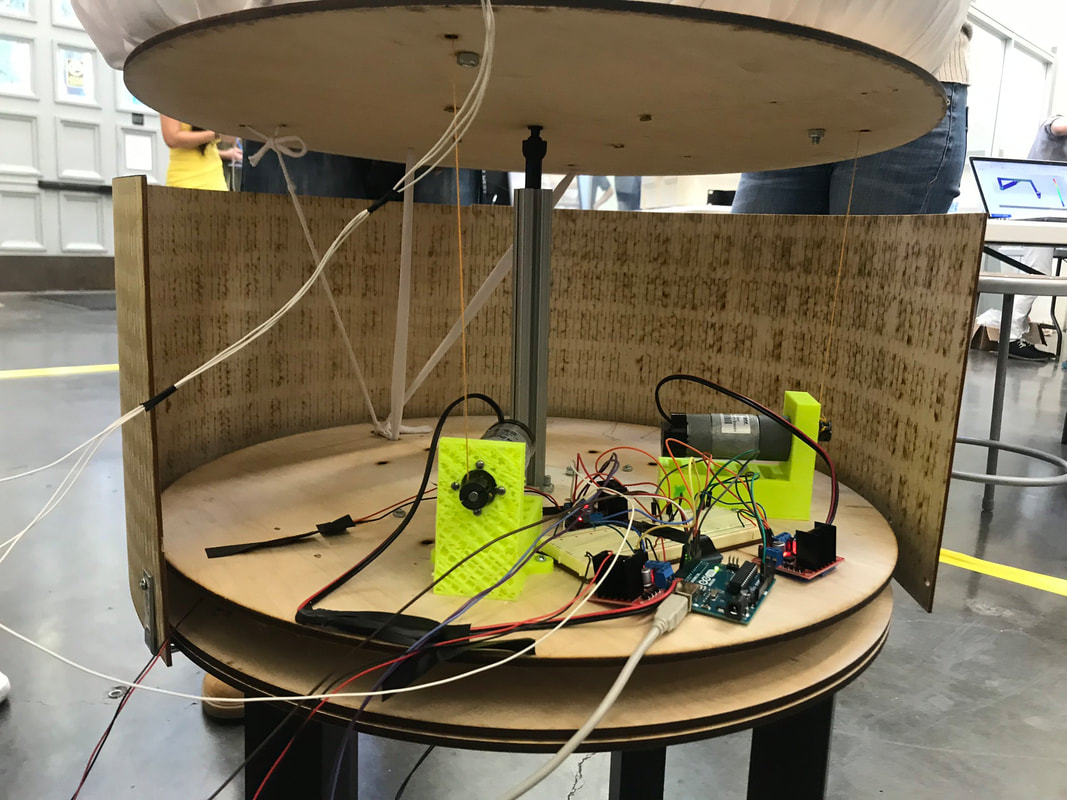
v2: We used string as a pulley system to maintain the same motion. This system provided a more smooth, bouncy motion and helped deliver a more clean rocking motion. This was our final design. The top plate is held up by a 8020 aluminum stand, for support with a ball bearing to provide 360-degree motion.
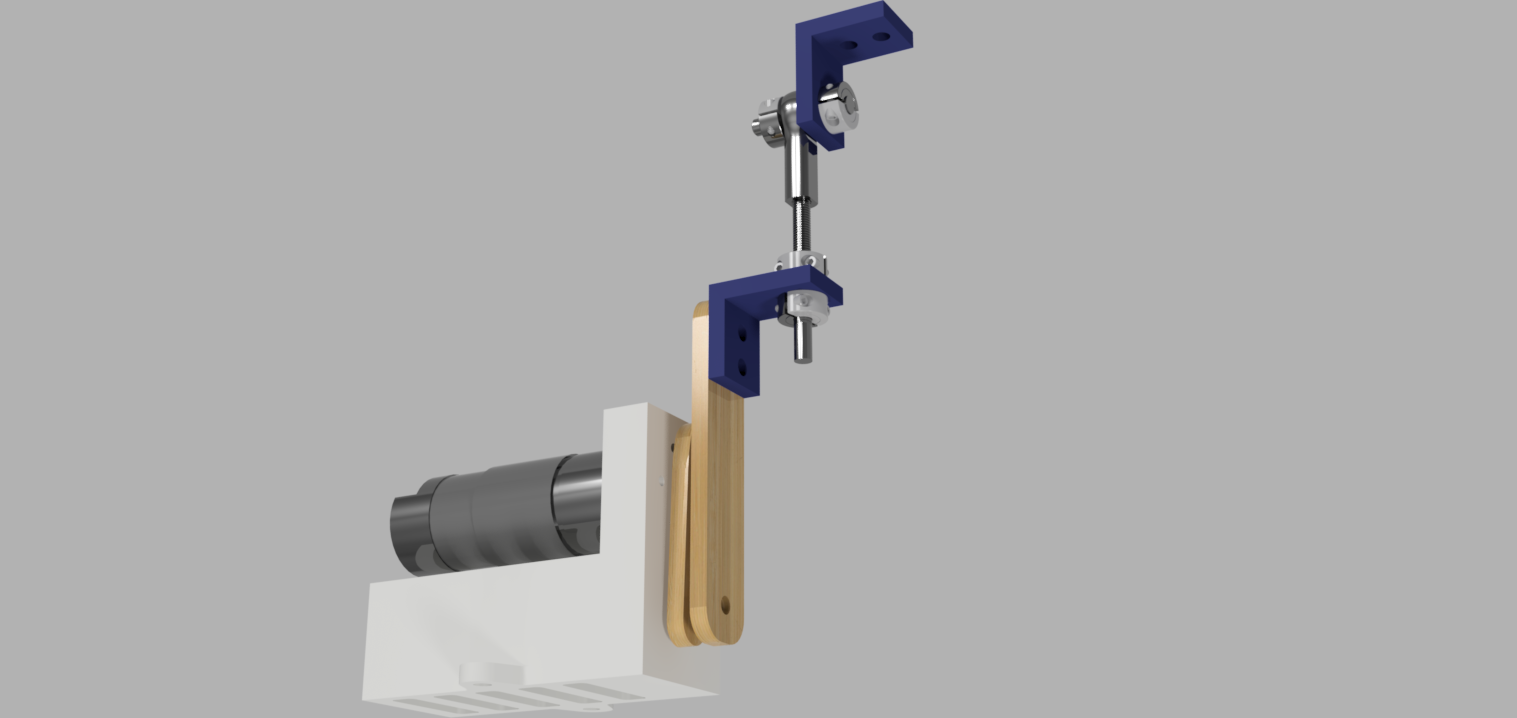
2-bar linkage attachment to motor
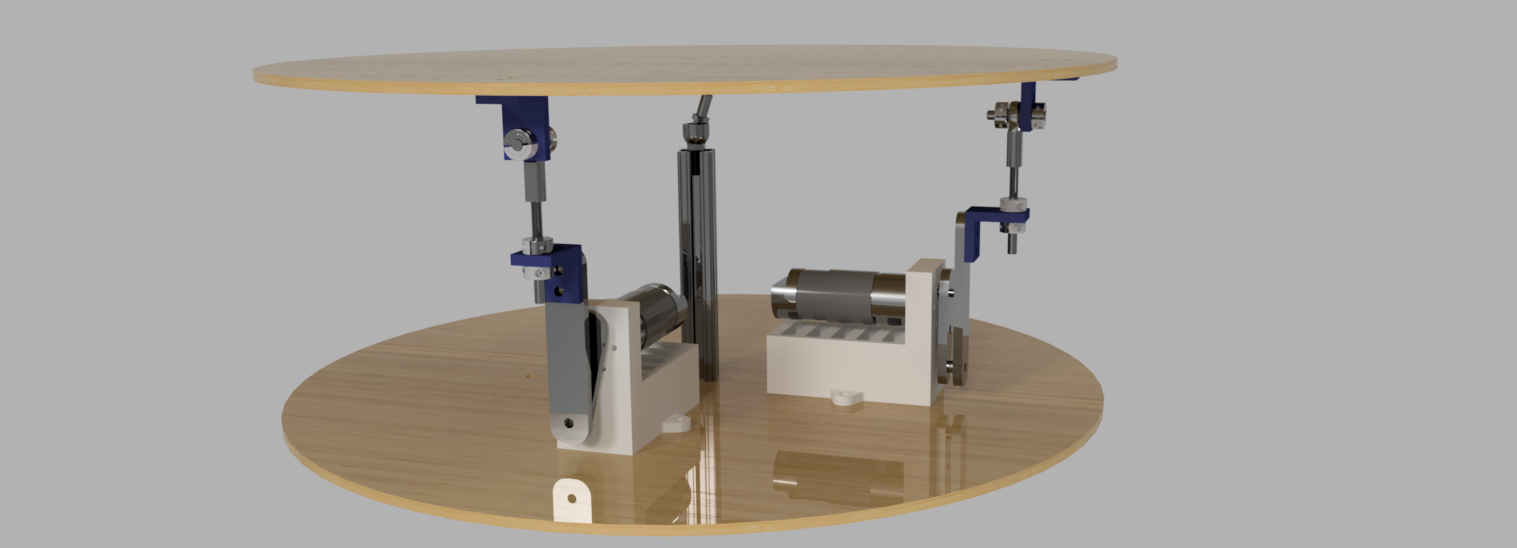
full assembly with center bearing
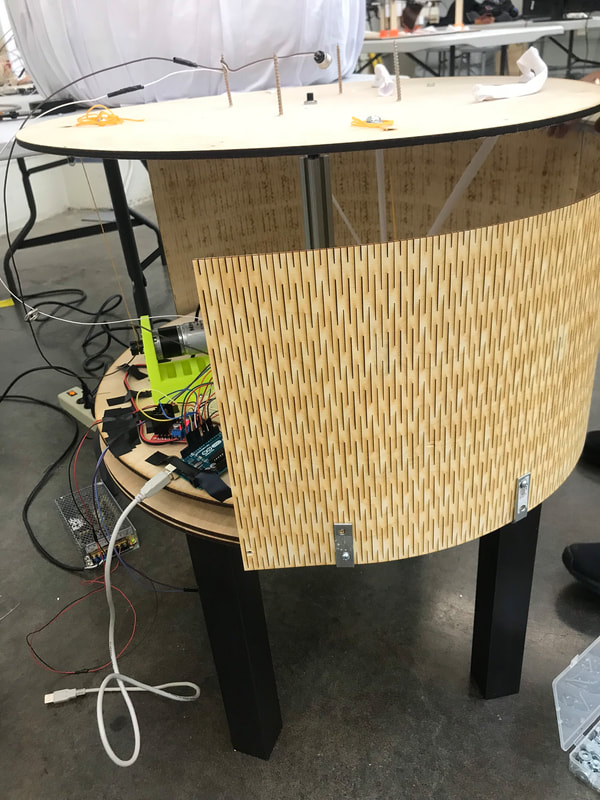
living hinge covering electronics
|
two sets of motors to provide 2 DOF motion
2-bar linkage assembly attached to platform
|
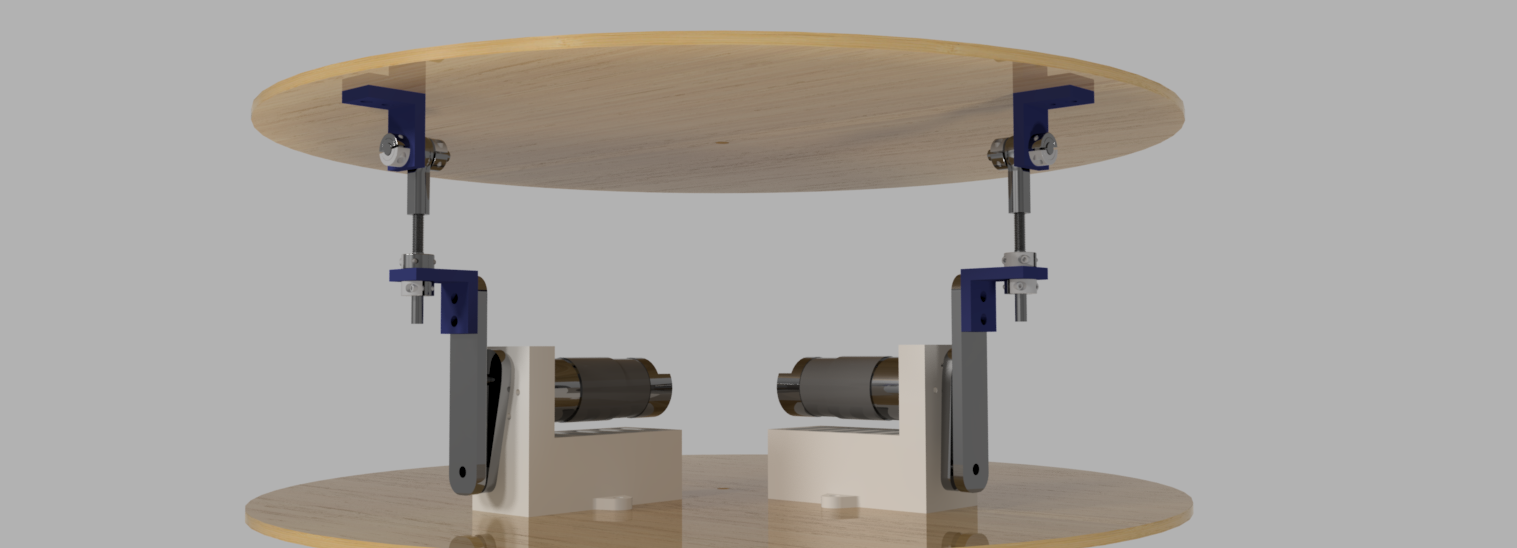
3D Printed motor mounts and L-brackets
pivot into the pulley system driven by strings attached to the motor shaft

fully assembled 3 dof before bassinet placed on top
|
The bassinet was carved out of lightweight styrofoam, and upholstered with a soft, elastic fabric.
The styrofoam was cut, carved (with kitchen knives), and covered with fabric to make the bed look comfortable and safe. A strap is sewn in with velcro to attach the baby, and the sound sensor is embedded to pick up baby cries.
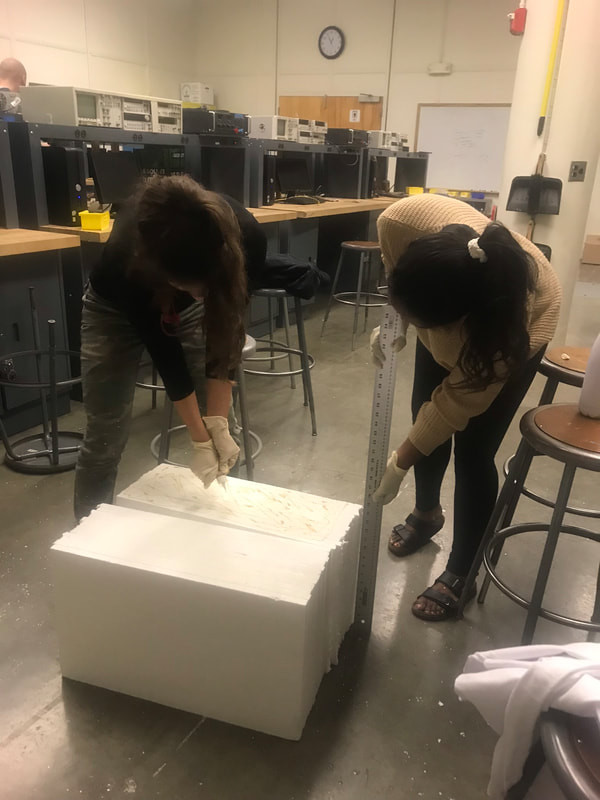
cutting and gluing 24 pieces of styrofoam together

upholstered with fabric and pins
|

pieces glued together, ready to cut

view of sound sensor and strap
|

fully carved and sanded cocoon shape

placed on top of 2dof assembly
|
Electronic components control the motor movements, as well as the interactive elements of the experience.
Motor Control:
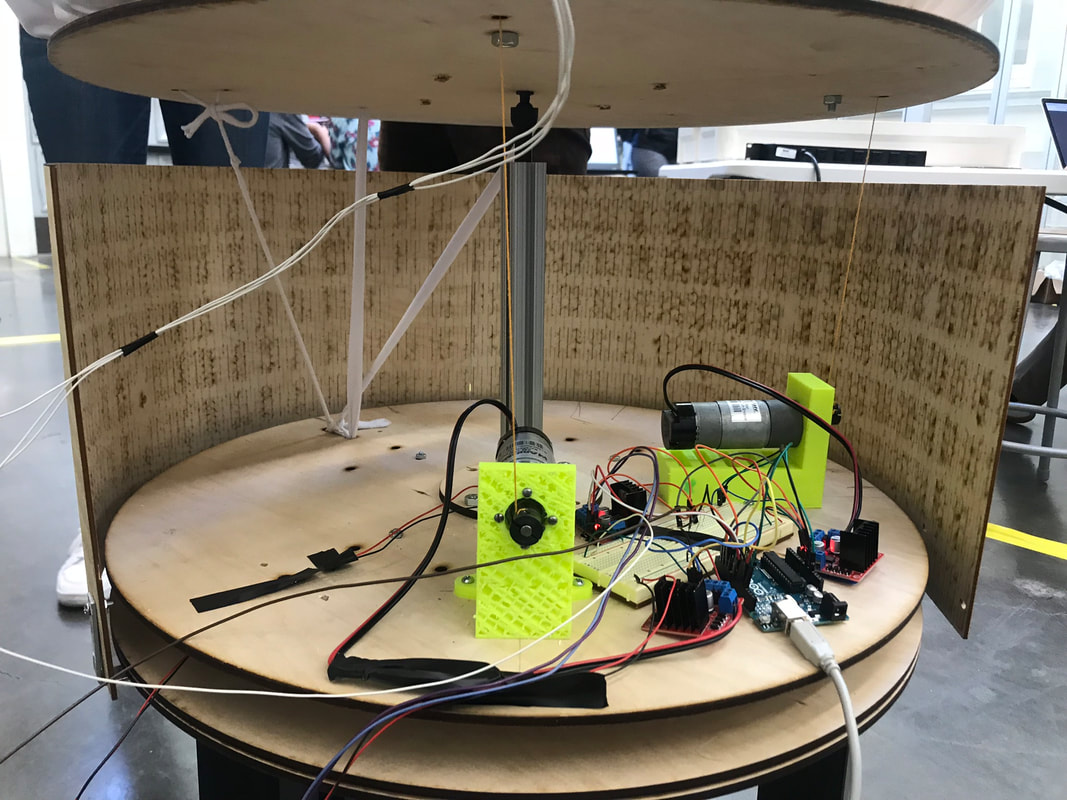
The first Arduino Uno is used to control the 3 DC motors - two 12V motors for the Steward Platform, and a third 5V motor attached to a lazy susan for the rotational motion. These motors were connected to H-Bridges, and the speed was controlled via PWM signals. A push button is used to switch between pre-programmed patterns of motion. External power supplies help deliver the necessary current to the motors and H-Bridge.
Real-Time Sound Monitoring:
An Arduino microphone sound sensor uses a threshold value to declare sounds "loud" or "quiet." The sensitivity to sound intensity is specified via the motion of a potentiometer. The sensor is able to distinguish baby cries, and outputs light colors via an RGB LED (red for loud cry, turquoise for quiet).
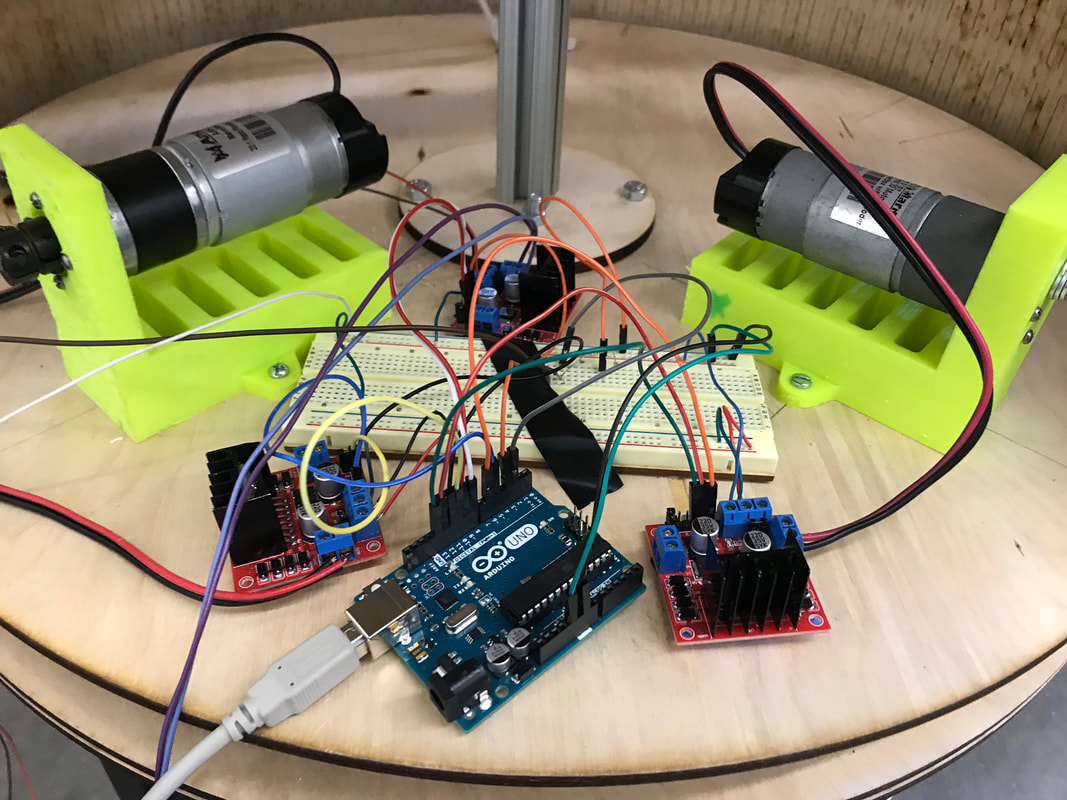
3 H-bridges used for motors
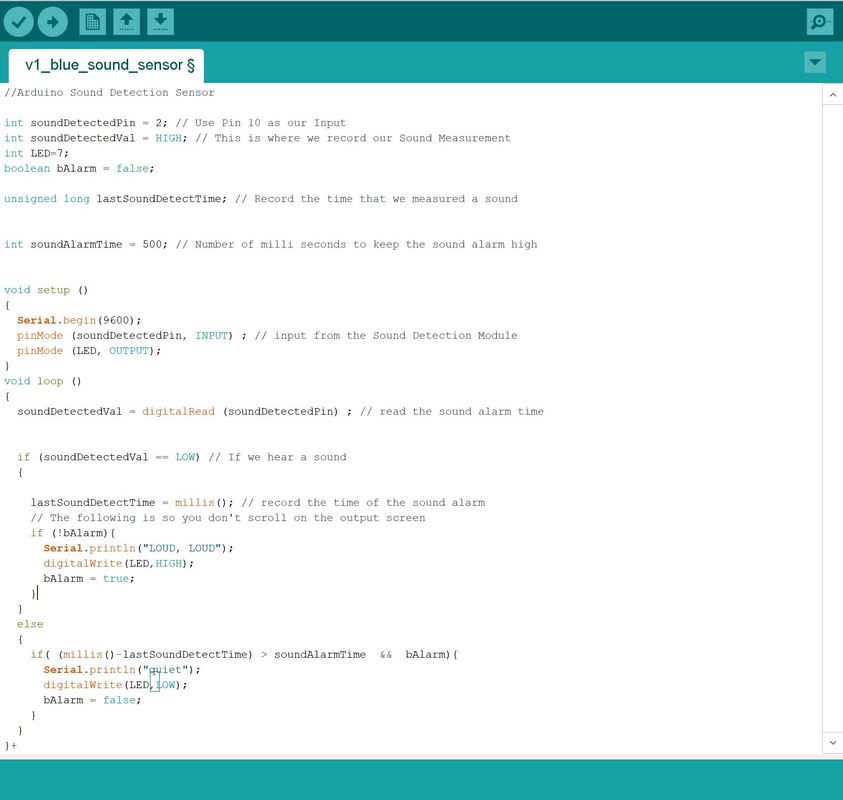
Arduino code for sound sensor input to RGB LED output
|
DC motors all controlled by one Arduino Uno
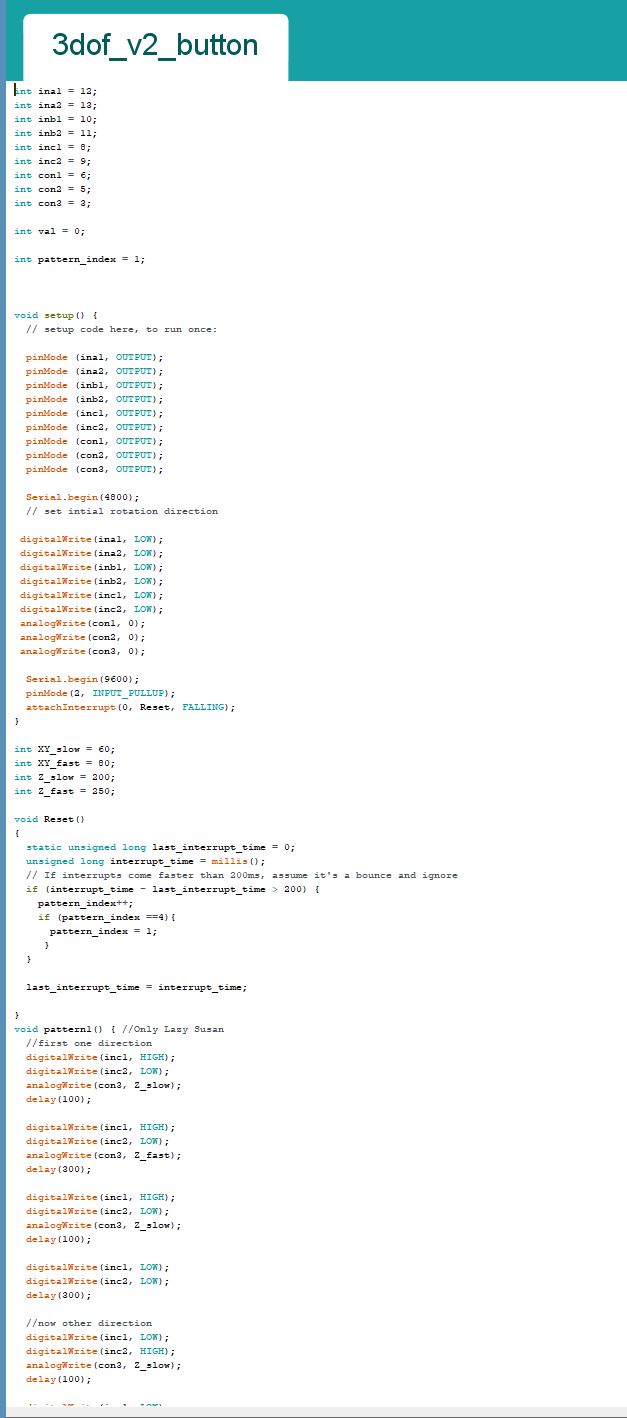
snippet of arduino code for button and motors - 3 rocking patterns written as separate functions, button helps switch between patterns using "interrupt" function
|
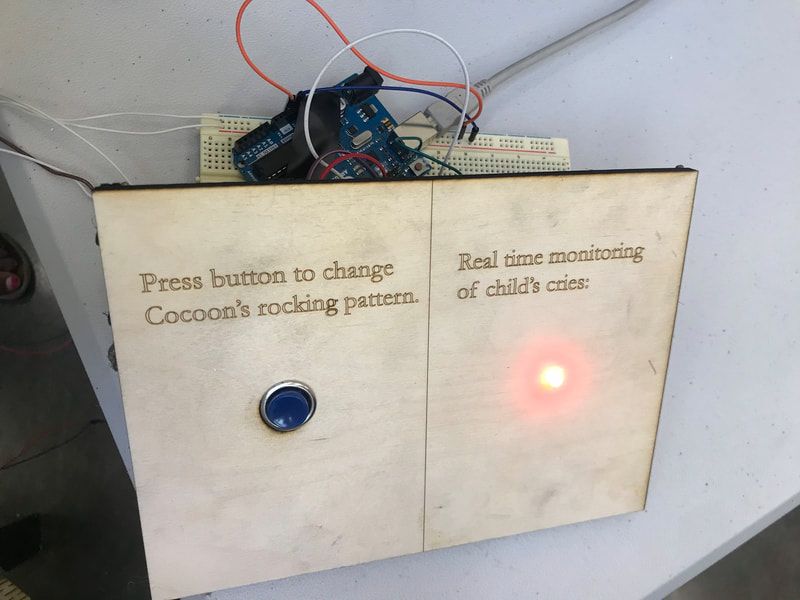
interactive button and real-time monitoring with LED output
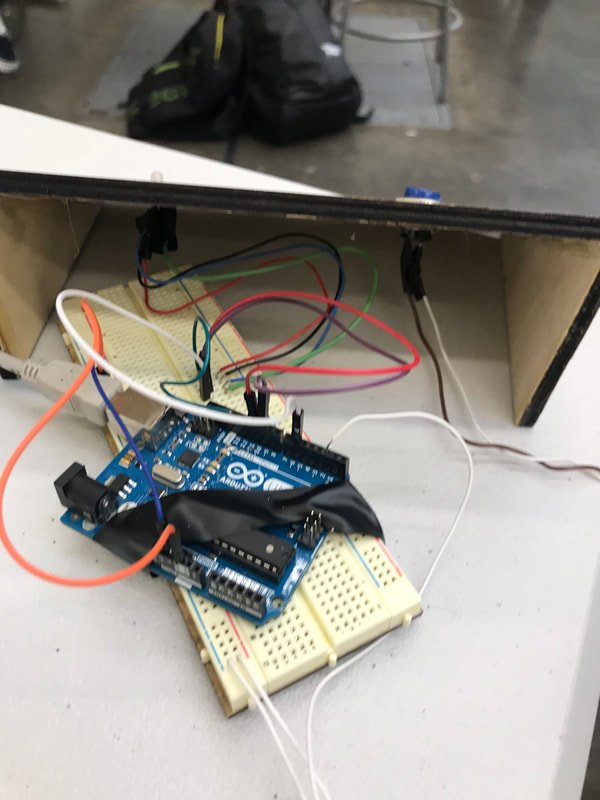
arduino wiring behind interactive plate
|
